类型推导
类型推导是如何工作的
类型推导指的是由输入值的类型推导其他值得类型得过程。
这两篇博客 (1, 2) 描述了 Julia 的类型推导实现。
调试 compiler.jl
You can start a Julia session, edit compiler/*.jl (for example to insert print statements), and then replace Core.Compiler in your running session by navigating to base/compiler and executing include("compiler.jl"). This trick typically leads to much faster development than if you rebuild Julia for each change.
A convenient entry point into inference is typeinf_code. Here's a demo running inference on convert(Int, UInt(1)):
# 获取方法
atypes = Tuple{Type{Int}, UInt} # 参数类型
mths = methods(convert, atypes) # 值得检验一下是否只有唯一一个方法
m = first(mths)
# 为 `typeinf_code` 调用创建所需的变量
params = Core.Compiler.Params(typemax(UInt)) # 参数是世界时间,
# typemax(UInt) -> 最近
sparams = Core.svec() # 这个特别的方法没有类型参数
optimize = true # 运行所有的推断优化
cached = false # 强制执行推断(不使用缓存的结果)
Core.Compiler.typeinf_code(m, atypes, sparams, optimize, cached, params)If your debugging adventures require a MethodInstance, you can look it up by calling Core.Compiler.code_for_method using many of the variables above. A CodeInfo object may be obtained with
# 返回 `convert(Int, ::UInt)` 的 CodeInfo 对象:
ci = (@code_typed convert(Int, UInt(1)))[1]内联算法 (inline_worthy)
Much of the hardest work for inlining runs in inlining_pass. However, if your question is "why didn't my function inline?" then you will most likely be interested in isinlineable and its primary callee, inline_worthy. isinlineable handles a number of special cases (e.g., critical functions like next and done, incorporating a bonus for functions that return tuples, etc.). The main decision-making happens in inline_worthy, which returns true if the function should be inlined.
inline_worthy implements a cost-model, where "cheap" functions get inlined; more specifically, we inline functions if their anticipated run-time is not large compared to the time it would take to issue a call to them if they were not inlined. The cost-model is extremely simple and ignores many important details: for example, all for loops are analyzed as if they will be executed once, and the cost of an if...else...end includes the summed cost of all branches. It's also worth acknowledging that we currently lack a suite of functions suitable for testing how well the cost model predicts the actual run-time cost, although BaseBenchmarks provides a great deal of indirect information about the successes and failures of any modification to the inlining algorithm.
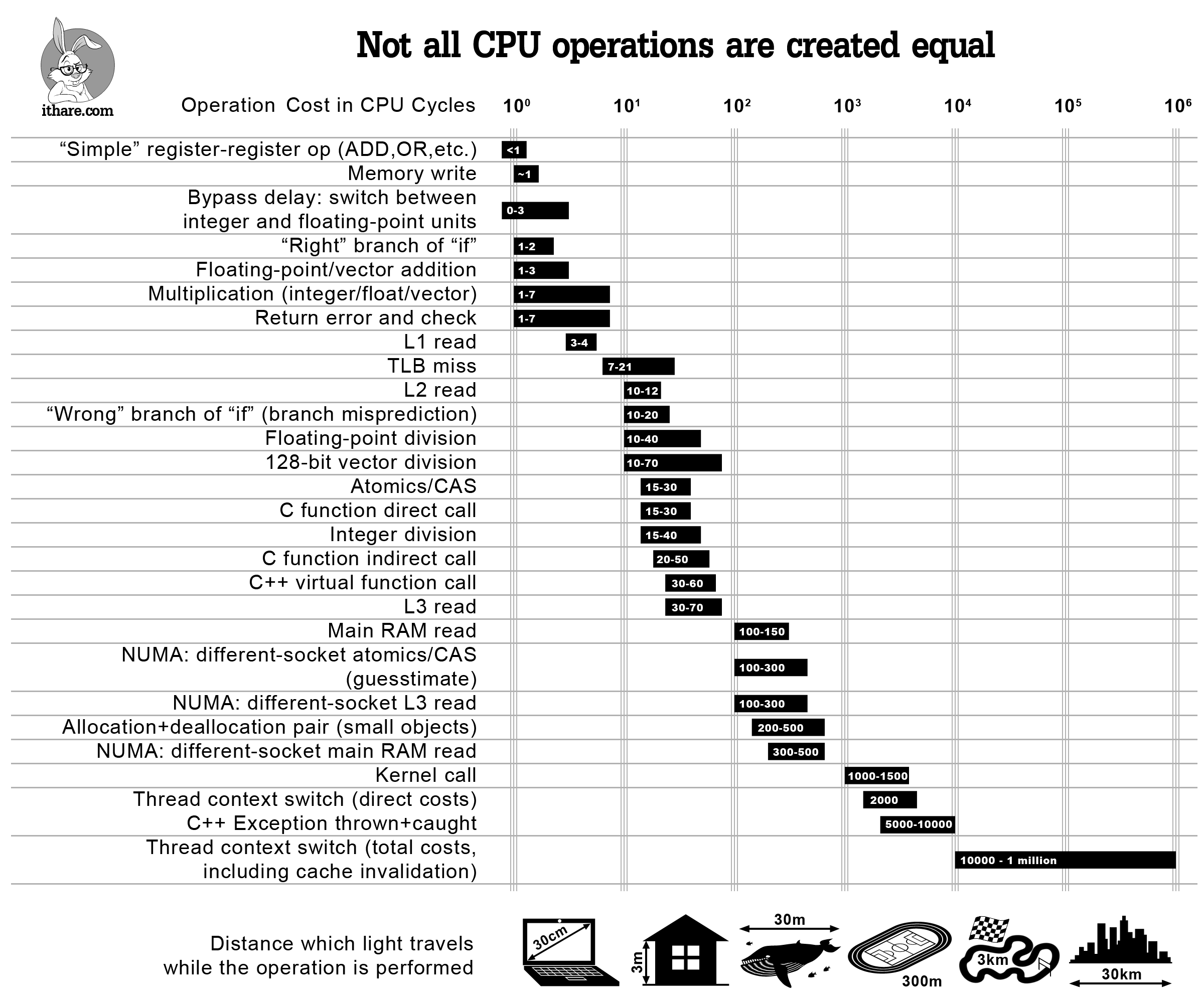
The foundation of the cost-model is a lookup table, implemented in add_tfunc and its callers, that assigns an estimated cost (measured in CPU cycles) to each of Julia's intrinsic functions. These costs are based on standard ranges for common architectures (see Agner Fog's analysis for more detail).
{kind=link}
We supplement this low-level lookup table with a number of special cases. For example, an :invoke expression (a call for which all input and output types were inferred in advance) is assigned a fixed cost (currently 20 cycles). In contrast, a :call expression, for functions other than intrinsics/builtins, indicates that the call will require dynamic dispatch, in which case we assign a cost set by Params.inline_nonleaf_penalty (currently set at 1000). Note that this is not a "first-principles" estimate of the raw cost of dynamic dispatch, but a mere heuristic indicating that dynamic dispatch is extremely expensive.
Each statement gets analyzed for its total cost in a function called statement_cost. You can run this yourself by following this example:
params = Core.Compiler.Params(typemax(UInt))
# 获取 CodeInfo 对象
ci = (@code_typed fill(3, (5, 5)))[1] # 我们将再 `fill(3, (5, 5))` 上尝试代码
# 计算每条语句得成本
cost(stmt) = Core.Compiler.statement_cost(stmt, ci, Base, params)
cst = map(cost, ci.code)The output is a Vector{Int} holding the estimated cost of each statement in ci.code. Note that ci includes the consequences of inlining callees, and consequently the costs do too.